DiscreteGuideTable#
- class scipy.stats.sampling.DiscreteGuideTable(dist, *, domain=None, guide_factor=1, random_state=None)#
離散導引表方法。
離散導引表方法從任意但有限的機率向量中取樣。它使用大小為 \(N\) 的機率向量或具有有限支持的機率質量函數,從分佈中產生隨機數。離散導引表的設置非常慢(與向量長度呈線性關係),但提供非常快速的取樣。
- 參數:
- distarray_like 或物件,選用
分佈的機率向量 (PV)。如果 PV 不可用,則預期為具有
pmf方法的類別實例。PMF 的簽名預期為:def pmf(self, k: int) -> float。即,它應接受 Python 整數並傳回 Python 浮點數。- domainint,選用
PMF 的支持域。如果機率向量 (
pv) 不可用,則必須給定有限域。即,PMF 必須具有有限支持。預設值為None。當None如果分佈物件 dist 提供
support方法,則會使用它來設定分佈的域。否則,支持域假定為
(0, len(pv))。當此參數與機率向量組合傳遞時,domain[0]用於將分佈從(0, len(pv))重新定位到(domain[0], domain[0]+len(pv)),並且domain[1]會被忽略。有關更詳細的說明,請參閱註解和教學。
- guide_factor: int,選用
導引表大小相對於 PV 長度。較大的導引表會導致更快的產生時間,但需要更昂貴的設置。不建議使用大於 3 的大小。如果相對大小設定為 0,則使用循序搜尋。預設值為 1。
- random_state{None, int,
numpy.random.Generator, 用於產生均勻隨機數串流的底層 NumPy 隨機數產生器或種子。如果 random_state 為 None(或 np.random),則使用
numpy.random.RandomState單例。如果 random_state 為 int,則會使用新的RandomState實例,並以 random_state 作為種子。如果 random_state 已經是Generator或RandomState實例,則使用該實例。
註解
當有限機率向量可用或分佈的 PMF 可用時,此方法有效。如果僅 PMF 可用,則還必須給定 PMF 的有限支持域。建議先通過評估支持域中每個點的 PMF 來獲得機率向量,然後使用它。
DGT 從任意但有限的機率向量中取樣。隨機數是通過反演方法產生的,即
產生一個隨機數 U ~ U(0,1)。
找到最小整數 I,使得 F(I) = P(X<=I) >= U。
步驟 (2) 是關鍵步驟。使用循序搜尋需要 O(E(X)) 次比較,其中 E(X) 是分佈的期望值。然而,索引搜尋使用導引表跳到某些 I’ <= I 附近的 I,以便在恆定時間內找到 X。實際上,當導引表的大小與機率向量相同時(這是預設值),預期的比較次數減少到 2。對於較大的導引表,這個數字會變小(但總是大於 1),對於較小的表,它會變大。對於表大小為 1 的極限情況,演算法只進行循序搜尋。
另一方面,導引表的設置時間為 O(N),其中 N 表示機率向量的長度(對於大小為 1,不需要預處理)。此外,對於非常大的導引表,記憶體效應甚至可能會降低演算法的速度。因此,我們不建議使用比給定機率向量大三倍以上的導引表。如果只需要產生少量隨機數,則(小得多)的表大小會更好。導引表大小相對於給定機率向量長度的大小可以通過
guide_factor參數設定。如果給定機率向量,它必須是沒有任何
inf或nan值的非負浮點數的一維陣列。此外,必須至少有一個非零條目,否則會引發異常。預設情況下,機率向量的索引從 0 開始。但是,可以通過傳遞
domain參數來更改此設定。當domain與 PV 組合給定時,它的作用是將分佈從(0, len(pv))重新定位到(domain[0], domain[0] + len(pv))。domain[1]在這種情況下會被忽略。參考文獻
[1]UNU.RAN 參考手冊,第 5.8.4 節,“DGT -(離散)導引表方法(索引搜尋)” https://statmath.wu.ac.at/unuran/doc/unuran.html#DGT
[2]H.C. Chen 和 Y. Asau (1974)。On generating random variates from an empirical distribution, AIIE Trans. 6, pp. 163-166.
範例
>>> from scipy.stats.sampling import DiscreteGuideTable >>> import numpy as np
要使用機率向量建立隨機數產生器,請使用
>>> pv = [0.1, 0.3, 0.6] >>> urng = np.random.default_rng() >>> rng = DiscreteGuideTable(pv, random_state=urng)
RNG 已設定完成。現在,我們可以立即使用
rvs方法從分佈中產生樣本>>> rvs = rng.rvs(size=1000)
為了驗證隨機變數是否遵循給定的分佈,我們可以使用卡方檢定(作為適合度量度)
>>> from scipy.stats import chisquare >>> _, freqs = np.unique(rvs, return_counts=True) >>> freqs = freqs / np.sum(freqs) >>> freqs array([0.092, 0.355, 0.553]) >>> chisquare(freqs, pv).pvalue 0.9987382966178464
由於 p 值非常高,我們無法拒絕虛無假設,即觀察到的頻率與預期頻率相同。因此,我們可以安全地假設變數是從給定的分佈產生的。請注意,這僅給出了演算法的正確性,而不是樣本的品質。
如果 PV 不可用,也可以傳遞具有 PMF 方法和有限域的類別實例。
>>> urng = np.random.default_rng() >>> from scipy.stats import binom >>> n, p = 10, 0.2 >>> dist = binom(n, p) >>> rng = DiscreteGuideTable(dist, random_state=urng)
現在,我們可以從分佈中取樣,使用
rvs方法,並測量樣本的適合度>>> rvs = rng.rvs(1000) >>> _, freqs = np.unique(rvs, return_counts=True) >>> freqs = freqs / np.sum(freqs) >>> obs_freqs = np.zeros(11) # some frequencies may be zero. >>> obs_freqs[:freqs.size] = freqs >>> pv = [dist.pmf(i) for i in range(0, 11)] >>> pv = np.asarray(pv) / np.sum(pv) >>> chisquare(obs_freqs, pv).pvalue 0.9999999999999989
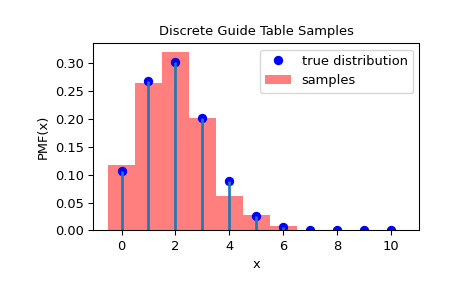
為了檢查樣本是否從正確的分佈中抽取,我們可以將樣本的直方圖視覺化
>>> import matplotlib.pyplot as plt >>> rvs = rng.rvs(1000) >>> fig = plt.figure() >>> ax = fig.add_subplot(111) >>> x = np.arange(0, n+1) >>> fx = dist.pmf(x) >>> fx = fx / fx.sum() >>> ax.plot(x, fx, 'bo', label='true distribution') >>> ax.vlines(x, 0, fx, lw=2) >>> ax.hist(rvs, bins=np.r_[x, n+1]-0.5, density=True, alpha=0.5, ... color='r', label='samples') >>> ax.set_xlabel('x') >>> ax.set_ylabel('PMF(x)') >>> ax.set_title('Discrete Guide Table Samples') >>> plt.legend() >>> plt.show()
要設定導引表的大小,請使用 guide_factor 關鍵字引數。這會設定導引表大小相對於機率向量的大小
>>> rng = DiscreteGuideTable(pv, guide_factor=1, random_state=urng)
要計算二項分佈的 PPF,其中 \(n=4\) 且 \(p=0.1\):我們可以按如下方式設定導引表
>>> n, p = 4, 0.1 >>> dist = binom(n, p) >>> rng = DiscreteGuideTable(dist, random_state=42) >>> rng.ppf(0.5) 0.0
方法
ppf(u)給定分佈的 PPF。
rvs([size, random_state])從分佈中取樣。
set_random_state([random_state])設定底層均勻隨機數產生器。