odeint#
- scipy.integrate.odeint(func, y0, t, args=(), Dfun=None, col_deriv=0, full_output=0, ml=None, mu=None, rtol=None, atol=None, tcrit=None, h0=0.0, hmax=0.0, hmin=0.0, ixpr=0, mxstep=0, mxhnil=0, mxordn=12, mxords=5, printmessg=0, tfirst=False)[原始碼]#
積分常微分方程式系統。
注意
對於新程式碼,請使用
scipy.integrate.solve_ivp來求解微分方程式。使用 FORTRAN 程式庫 odepack 中的 lsoda 求解常微分方程式系統。
求解剛性或非剛性一階 ode-s 系統的初始值問題
dy/dt = func(y, t, ...) [or func(t, y, ...)]
其中 y 可以是向量。
注意
預設情況下,func 的前兩個引數的必要順序與
scipy.integrate.ode類別和函式scipy.integrate.solve_ivp使用的系統定義函式中的引數順序相反。若要使用簽名為func(t, y, ...)的函式,則必須將引數 tfirst 設定為True。- 參數:
- func可呼叫物件(y, t, …) 或 可呼叫物件(t, y, …)
計算 y 在 t 的導數。如果簽名為
callable(t, y, ...),則必須將引數 tfirst 設定為True。func 不得修改 y 中的資料,因為它是 ODE 求解器在內部使用的資料的檢視。- y0陣列
y 的初始條件(可以是向量)。
- t陣列
要求解 y 的時間點序列。初始值點應為此序列的第一個元素。此序列必須單調遞增或單調遞減;允許重複值。
- argstuple,選用
要傳遞給函式的額外引數。
- Dfun可呼叫物件(y, t, …) 或 可呼叫物件(t, y, …)
func 的梯度(雅可比矩陣)。如果簽名為
callable(t, y, ...),則必須將引數 tfirst 設定為True。Dfun 不得修改 y 中的資料,因為它是 ODE 求解器在內部使用的資料的檢視。- col_derivbool,選用
如果 Dfun 定義了沿著欄的導數(較快),則為 True,否則 Dfun 應定義沿著列的導數。
- full_outputbool,選用
若為 True,則傳回選用輸出的字典作為第二個輸出
- printmessgbool,選用
是否列印收斂訊息
- tfirstbool,選用
若為 True,則 func(和 Dfun,如果給定)的前兩個引數必須是
t, y而不是預設的y, t。在版本 1.1.0 中新增。
- 傳回:
- y陣列,形狀 (len(t), len(y0))
包含 t 中每個所需時間的 y 值的陣列,初始值 y0 位於第一列。
- infodictdict,僅在 full_output == True 時傳回
包含額外輸出資訊的字典
key
意義
‘hu’
每個時間步長成功使用的步長向量
‘tcur’
每個時間步長達到的 t 值向量(始終至少與輸入時間一樣大)
‘tolsf’
公差比例因子向量,大於 1.0,在偵測到要求過高精確度時計算
‘tsw’
上次方法切換時的 t 值(針對每個時間步長給定)
‘nst’
時間步長的累積次數
‘nfe’
每個時間步長的函式評估累積次數
‘nje’
每個時間步長的雅可比矩陣評估累積次數
‘nqu’
每個成功步長的方法階數向量
‘imxer’
在錯誤傳回時,加權局部誤差向量 (e / ewt) 中最大量級的元件索引,否則為 -1
‘lenrw’
所需的雙精度工作陣列長度
‘leniw’
所需的整數工作陣列長度
‘mused’
每個成功時間步長的方法指示器向量:1:adams(非剛性),2:bdf(剛性)
- 其他參數:
- ml, muint,選用
如果這些值都不是 None 或非負數,則假設雅可比矩陣為帶狀矩陣。這些值給出了此帶狀矩陣中下對角線和上對角線的非零對角線數。對於帶狀矩陣情況,Dfun 應傳回一個矩陣,其列包含非零帶(從最低對角線開始)。因此,當
ml >=0或mu >=0時,從 Dfun 傳回的矩陣 jac 的形狀應為(ml + mu + 1, len(y0))。jac 中的資料必須以jac[i - j + mu, j]保存第i個方程式對於第j個狀態變數的導數的方式儲存。如果 col_deriv 為 True,則必須傳回此 jac 的轉置。- rtol, atolfloat,選用
輸入參數 rtol 和 atol 決定求解器執行的錯誤控制。求解器將根據
max-norm of (e / ewt) <= 1形式的不等式來控制 y 中估計局部錯誤的向量 e,其中 ewt 是計算為ewt = rtol * abs(y) + atol的正錯誤權重向量。rtol 和 atol 可以是與 y 長度相同的向量或純量。預設值為 1.49012e-8。- tcritndarray,選用
應注意積分的臨界點向量(例如,奇異點)。
- h0float,(0:求解器決定),選用
要在第一步嘗試的步長。
- hmaxfloat,(0:求解器決定),選用
允許的最大絕對步長。
- hminfloat,(0:求解器決定),選用
允許的最小絕對步長。
- ixprbool,選用
是否在方法切換時產生額外列印。
- mxstepint,(0:求解器決定),選用
每個 t 中的積分點允許的最大(內部定義)步數。
- mxhnilint,(0:求解器決定),選用
列印的最大訊息數。
- mxordnint,(0:求解器決定),選用
非剛性(Adams)方法允許的最大階數。
- mxordsint,(0:求解器決定),選用
剛性(BDF)方法允許的最大階數。
範例
受重力和摩擦力作用的擺錘角度 theta 的二階微分方程式可以寫成
theta''(t) + b*theta'(t) + c*sin(theta(t)) = 0
其中 b 和 c 是正常數,而撇號(’)表示導數。若要使用
odeint求解此方程式,我們必須先將其轉換為一階方程式系統。透過定義角速度omega(t) = theta'(t),我們得到系統theta'(t) = omega(t) omega'(t) = -b*omega(t) - c*sin(theta(t))
令 y 為向量 [theta, omega]。我們在 Python 中將此系統實作為
>>> import numpy as np >>> def pend(y, t, b, c): ... theta, omega = y ... dydt = [omega, -b*omega - c*np.sin(theta)] ... return dydt ...
我們假設常數為 b = 0.25 和 c = 5.0
>>> b = 0.25 >>> c = 5.0
對於初始條件,我們假設擺錘幾乎垂直,theta(0) = pi - 0.1,並且最初處於靜止狀態,因此 omega(0) = 0。則初始條件向量為
>>> y0 = [np.pi - 0.1, 0.0]
我們將在區間 0 <= t <= 10 中生成 101 個均勻間隔樣本的解。因此,我們的時間陣列為
>>> t = np.linspace(0, 10, 101)
呼叫
odeint以產生解。若要將參數 b 和 c 傳遞給 pend,我們使用 args 引數將它們提供給odeint。>>> from scipy.integrate import odeint >>> sol = odeint(pend, y0, t, args=(b, c))
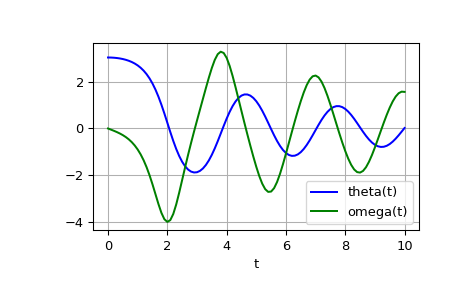
解是一個形狀為 (101, 2) 的陣列。第一欄是 theta(t),第二欄是 omega(t)。以下程式碼繪製兩個元件。
>>> import matplotlib.pyplot as plt >>> plt.plot(t, sol[:, 0], 'b', label='theta(t)') >>> plt.plot(t, sol[:, 1], 'g', label='omega(t)') >>> plt.legend(loc='best') >>> plt.xlabel('t') >>> plt.grid() >>> plt.show()